所标售价非实际售价,询价请联系沈经理。联系电话:
基于STM32 四轴飞行器控制系统(开源源码)

一、产品简介
1. l开源,可二次开发;
2. l支持定高飞行、手动飞行以及定点飞行(搭配光流模块);
3. l支持4D 空翻;
4. l支持抛飞;
5. l支持有头(X 模式)和无头模式飞行;
6. l支持一键起飞,一键降落;
7. l支持手机WIFI 控制,拍照和视频录制(搭配wifi 摄像头模块);
8. l支持USB 固件升级;
9. l支持多种扩展模块;
二、详细参数
硬件参数 | |
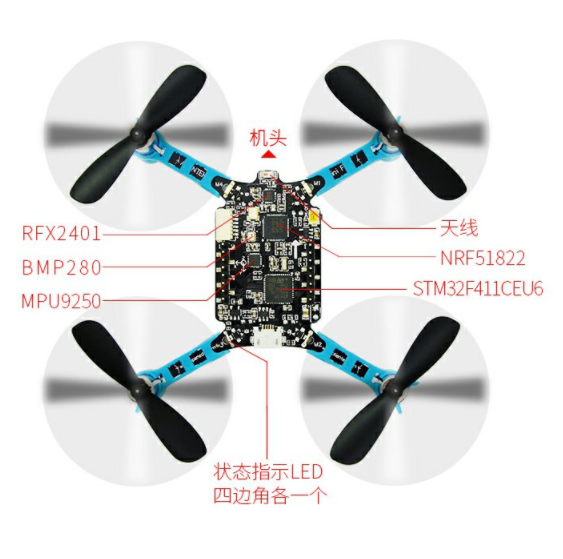
微控制器 (MCU) | STM32F411CEU6Cortex-M4100MHz512KB(Flash)128K(SRAM) |
NRF51822Cortex-M016MHz256K(Flash)16K(SRAM) | |
传感器 IMU | MPU9250(3轴加速计+3轴陀螺仪+3轴磁力计)+ BMP280(气压传感器) |
通信 | NRF51822-QFAA 2.4G |
电池 | 3.7V/250mAh锂电池充电时间30min飞行时间约9min(无任何负载) |
电机和桨叶 | 716空心杯电机 + 46mm 桨叶对角电机轴距92mm*92mm |
尺寸 | 130*130mm(含护圈)对角电机轴距92mm*92mm |
重量 | 重量32g(含电池和护圈)负重15g |
遥控器 | |
微控制器(MCU) | STM32F103C8T6Cortex-M372MHz64K(Flash)20K(SRAM) |
人机交互 | 0.96 寸蓝色 OLED |
通信 | NRF24L01+ + PA + 3dbi 天线 |
通信距离 | 100M |