ErgoLAB Motion 惯性动作捕捉
产品概述:
ErgoLAB Motion可穿戴人体运动捕捉与人机工效分析系统是基于无线惯性传感技术的全身三维动作捕捉及工效学评价系统。ErgoLAB Motion系统结合了加速度传感器、陀螺仪、方位传感器实时采集人体动作,位置,速度,关节角度,扭矩(可用数据包括:Flexion extension,弯曲/伸展;Abduction adduction,外展/内收;Torsion,扭转以及Angular velocity,角速度与Angular acceleration.角加速度等。)

产品特点:
l 无线传输。
l 高精度。
l 快速安装。
l 灵活场地。
l 数据记录。
l 同步采集。
l 多维数据分析。
l 数据输出格式。
l 环境适应性。
产品参数:
陀螺仪采样率 | 128 Hz/通道 |
加速度采样率 | 128 Hz/通道 |
磁力仪采样率 | 128Hz/通道 |
传感器数量 | 全身15个惯性动作捕捉传感器 |
通道数 | 4 (Quaternion) /每个传感器 |
应用方向:
l 工业工程与安全工程领域
l 工业设计与人机交互领域
l 士兵训练与装备设计领域
l 交通驾驶与行为安全领域
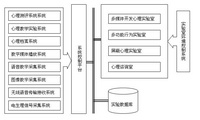
ErgoLAB多模态同步方案:
整体概述
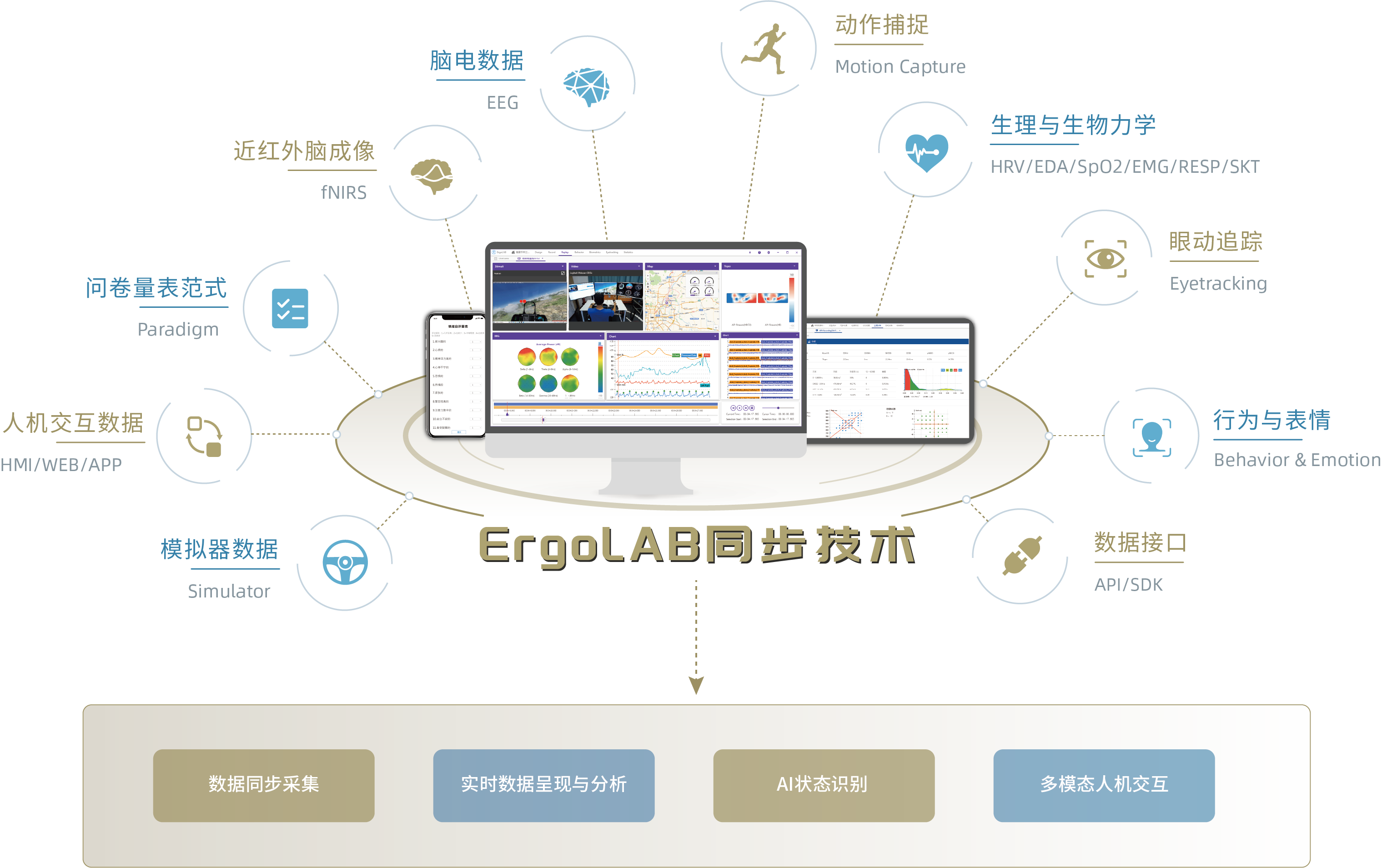
ErgoLAB人机环境同步平台采用多模态数据时钟同步技术,平台可完成完整的实验和测评流程,包括项目管理-试验设计-同步采集-信号处理-数据分析-人因智能评估-可视化报告,支持基于云架构技术的团体测试和大数据管理。
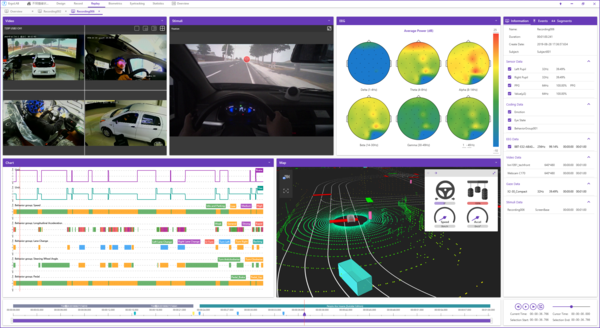
ErgoLAB人机环境同步平台采用主客观结合多模态数据同步采集与多维度验证的方法,数据实时同步种类包含大脑认知数据(EEG/BCI脑电仪与脑机接口边缘计算设备、fNIRS/BCI近红外脑成像仪),视觉数据(Eyetracker眼动仪与视线交互系统),生理数据(生理仪含:GSR/EDA、EMG、ECG、EOG、HRV、RESP、TEMP/SKT、PPG、SpO2),行为观察、肢体动作与面部表情(基本情绪、情绪效价、微表情等)数据、生物力学数据(拉力、握力、捏力、压力…),人机交互数据(包含人机界面交互行为数据以及对应的键盘操作,鼠标点击、悬浮、划入划出等;移动终端人机交互行为数据以及对应的手指轨迹操作行为如点击、缩放、滑动等;VR终端界面人机交互行为数据及对应的双手操作拾取、丢弃、控制,VR空间行走轨迹)、以及多类型时空行为轨迹数据采集(包括室内、户外、以及VR环境不同时空的行走轨迹、行车轨迹、访问状态以及视线交互、情感反应、交互操作行为等数据实时同步采集)、以及作业空间及作业环境数据(温度、湿度、噪音、光照、大气压、湿度、粉尘等)等客观量化数据;为科学研究及应用提供完整的数据指标。
ErgoAI人因智能:
将人工智能技术引入人因工程研究工具,人因工程行业更加深度,使得实验环境不会受限于某一种设备或数据指标,采集分析不同典型行业或学科专业的人-机-环境系统交互过程中自然状态下的人类行为数据,获取更接近真实人员状态的数据。平台还提供覆盖科研实验全流程的功能模块,包括项目管理、实验设计、同步采集、数据分析、综合统计和可视化报告,结合ErgoAI人因智能边缘计算平台为多模态人机环境研究提供一站式人因工程+人工智能解决方案。以ErgoLAB人机环境同步平台和ErgoAI人因智能边缘计算平台为核心的多模态同步人因智能解决方案大大提高了实验结果的信效度,同时节省了研究的人力、物力、时间,提高了研究与测评的整体效率。



基于ErgoAI人因智能多元时序算法底座与人因工程人机环境数据库,构建人员特定状态的预训练模型,配合高灵活度的训练方案管理功能,用户能够在统一环境中构建和优化模型。 从而实现对人员状态的精准实时评估与预警,如负荷状态、应激状态、疲劳状态、情景意识和注意能力等。

Kingfar公司介绍:
北京津发科技股份有限公司是专精特新重点小巨人,知识产权优势企业、高新技术企业、科技型中小企业;旗下包含北京人因智能工程技术研究院和北京人因工程设计院等科技研发机构,并联合共建了北京市企业技术中心、北京本科高校产学研深度协同育人平台、苏州市重点实验室、湖南省工程实验室、山东省工程研究中心等多个科技创新平台。
津发科技承担和参与了多项重点研发计划、工信部高质量发展专项、自然科学基金等课题基金。担任全国信标委XR扩展现实标准化组副组长单位,工信部元宇宙标准化工作组关键技术组联合组长单位;津发科技创新研发了国产化自主可控的人因工程与人因智能边缘计算系列信创产品与技术,荣获多项省部级科学技术奖励;津发科技主持和参编国际、行业/团体标准20余项、荣获30余项省部级新技术新产品认证,全球申请专利超过500项、100余项国际和注册商标、130余项软件著作权;已服务全国高等院校和装备科技工业科研院所应用示范,并已支撑国内科研学者和科技工作者发表中英文学术论文超过1000篇。